平衡自行车-实践篇
平衡自行车-理论篇
自行车平衡原理
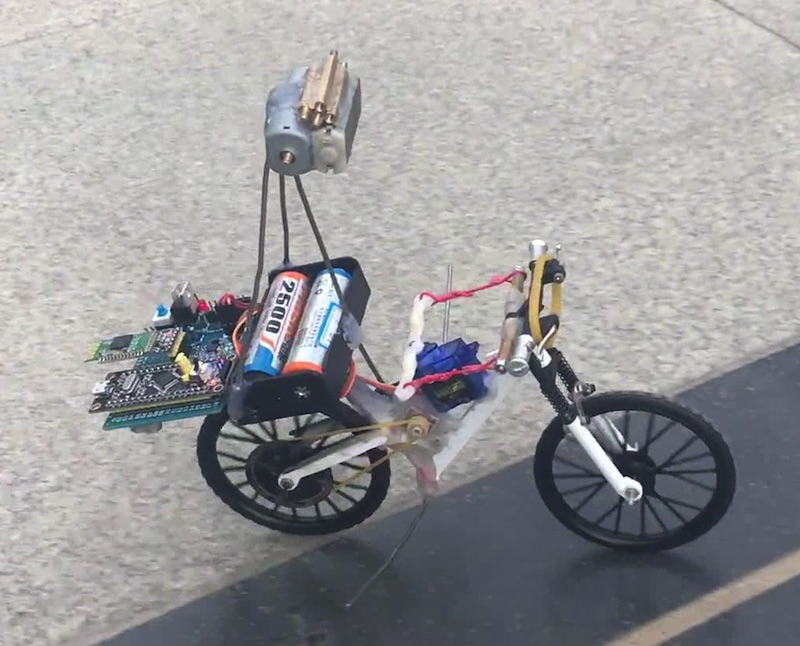
博主曾做过一个自平衡的自行车,
早就想写一个教程,一直拖了很长时间,这几天下定决心一定要战胜拖延症。
自行车平衡DIY分为3部分介绍:
第一部分也就是本文,介绍自行车平衡基本物理原理;
第二部分理论篇,对平衡自行车的算法进行理论分析,包括模型分析、姿态检测方法、PID算法,控制算法;
第三部分实践篇,具体介绍平衡自行车用到的元器件,动力、转向、电路及代码分析。
Stm32串口isp
树莓派-wiringPi-wiringPi-C的i2c库使用
在linux上层有一个操作i2c的通用接口——smbus,在这里我们不介绍smbus的使用,但要知道wiringPi的i2c接口就是在linux上层基于smbus封装的。
wiringPi封装的函数中,有byte和word的读写,但是没有封装block的读写。也就是说,没有提供一次写大块数据的方法。
树莓派-wiringPi-树莓派的i2c配置
树莓派-wiringPi-UART串口
树莓派-wiringPi-优先级&中断&线程
wiringPi库真是包含了各个方面,甚至提供了进程操作接口。
使用wiringPi的接口可以很方便地创建新进程。
树莓派-wiringPi-时间函数
wiringPi不仅提供硬件操作的接口,同时也提供了一些时间管理函数。
树莓派-wiringPi-GPIO