平衡自行车-实践篇
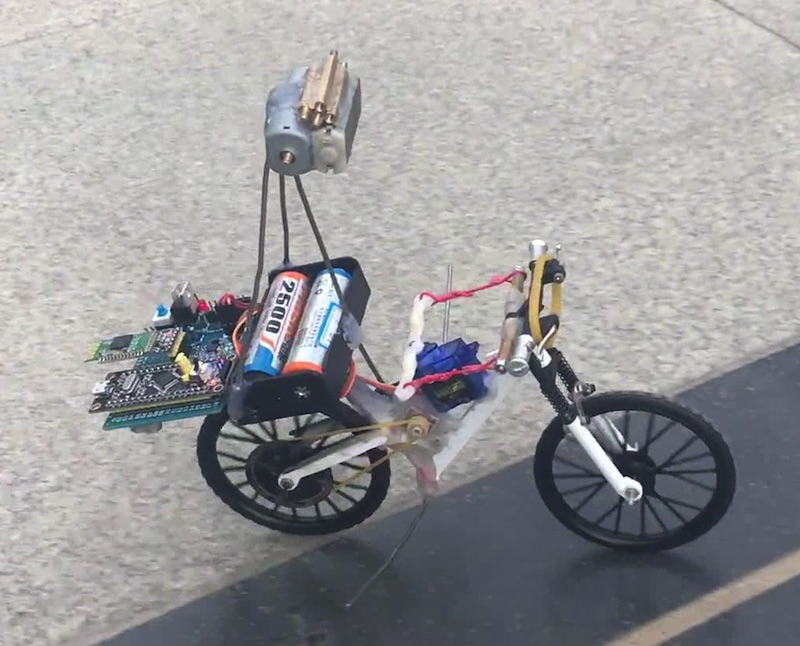
在本文将会介绍平衡自行车的具体制作过程,包括机械、电路和代码。
平衡自行车完整的代码托管在 https://github.com/nicekwell/balance_bike。
一、材料
机械
| 名称 | 数量 | 备注 |
|---|---|---|
| 铜柱、铁丝、胶枪等基础材料和工具 | ||
| 自行车架 | 1 | 自己做车架是很麻烦的,我是直接买的车架,淘宝上搜”自行车 拼装 DIY”能搜到很多 |
| 舵机 | 1 | 转向用的,对于我用的1:6车架,普通舵机有点大,我用的是9g舵机 |
| N20电机 | 1 | 选扭力大一点,这样转速会比较稳定 |
| 皮带轮和皮带 | 如上面的图片,我是用皮带来传输动力的 |
电路
| 名称 | 数量 | 备注 |
|---|---|---|
| 电池、电池盒 | ||
| 洞洞板 | ||
| lm1117-3.3 | 降压芯片给控制系统供电 | |
| stm32f103c8t6核心板 | 1 | |
| gy521模块 | 1 | 加速度传感器 + 陀螺仪 |
| 升压模块 | 1 | 升到12v给电机供电,根据电机特性选择是否使用升压模块 |
| 8050三极管 | 2 | 驱动电机,由于自行车不需要反转,所以不需要使用电机驱动芯片,用三极管就能方便地实现。我用了两个三极管并联提高功率。 |
| 自锁开关 | 1 | 整个系统开关 |
| led指示灯 | 1 | 配合1k限流电阻 |
| 蓝牙模块 | 1 | 可选,如果想要遥控的话就使用蓝牙 |
二、动力部分
传动方式
如图,我用的是皮带传送的方式,因为比较好实现。

电机选择
这个DIY是不考虑变速情况的,平衡的参数都是按照一个固定速度调的。
所以动力部分的作用就是提供一个恒定的速度,并且这个速度尽可能稳定,尽可能不受外部影响。
电机应选择扭力大一些、转速稳定的减速电机。
电机供电
电机是直接供电还是使用升压模块供电要根据电机特性,有些电机用升压模块可以提高功率,有些大电流电机用升压模块反而可能限制了电流。
我这里用升压模块升到12v给N20电机供电的。

另外,电机通过三极管受stm32控制,通过控制占空比也可以限制电机输出的功率。
三、转向部分
转向部分用一个舵机带动把手转动即可。

四、电路
在github工程里有详细的引脚连接表 https://github.com/nicekwell/balance_bike。
供电
用3.3v稳压芯片给整个控制系统供电,包括单片机、GY521模块、蓝牙模块。
用5v稳压芯片给舵机供电。
用12v升压模块给电机供电。
下载
我是用串口给stm32下载程序的。
| 引脚 | 功能 | 备注 |
|---|---|---|
| PA9 | 下载TXD | |
| PA10 | 下载RXD |
GY521
这个模块通过i2c通信,只需要连接4根线。
| 引脚 | 功能 | 备注 |
|---|---|---|
| 3.3v | ||
| GND | ||
| PB0 | GY521 I2C SCL | |
| PB1 | GY521 I2C SDA | 用的是IO模拟i2c |
电机
点击用12v升压模块供电,由于不需要反转,用三极管即可直接驱动,电路图如下:
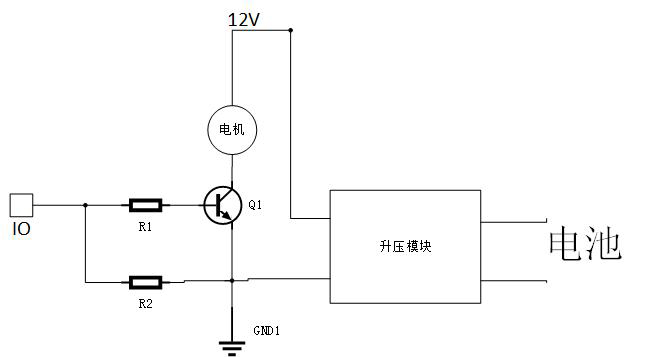
加三极管的目的是为了可以通过调节PWM占空比来限制输出功率,但我的实际情况是100%输出时动力才勉强足够。所以如果你不需要限制电机输出功率,或者通过其他方式限制输出功率,也可以不要三极管,不通过单片机控制。
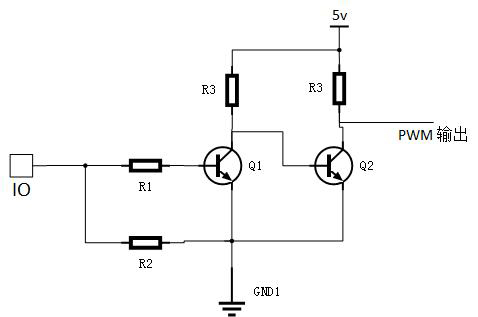
舵机
舵机是用5v供电的,而单片机是3.3v电平,对于pwm控制脚可以通过2个三极管实现同相的电平转换:
蓝牙模块
下图是我使用的蓝牙串口模块,可以实现串口透传,只需要4根线连接:vcc、gnd、txd、rxd。
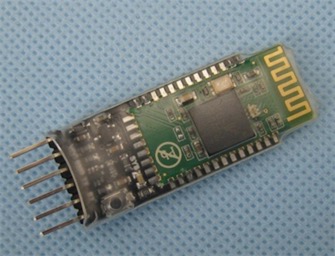
蓝牙模块是用来调试和遥控的,没有它也能跑。建议还是加上这个模块,在调试PID擦数时会非常方便。
关于调试方面的内容可以参考我写的另一片文章:谈一谈单片机开发的几种调试方案
五、代码结构
代码提交在github https://github.com/nicekwell/balance_bike。
主要分为3个部分:1、基础的驱动程序,实现电机、舵机、gy521数据读取;2、平衡控制系统,核心是一个20ms定时器,每20ms进行一次数据采集、计算和响应;3、遥控和调试系统,实现log输出、接收遥控信息。
驱动
| 名称 | 文件 | 功能 |
|---|---|---|
| i2c | i2c/i2c.c, include/i2c.h | IO 模拟i2c驱动,提供i2c基础操作 |
| gy521 | gy521/gy521.c, include/gy521.h | gy521模块驱动,基于i2c驱动,提供加速度和角速度的读取接口 |
| motor | motor/motor.c, include/motor.h | 电机驱动,提供占空比控制接口 |
| angle | angle/angle.c, include/angle.h | 舵机驱动,提供角度控制接口 |
平衡控制
main函数会初始化一个定时器20ms中断一次,调用 main/balance.c 里的 balance_tick 函数,平衡算法在 main/balance.c 实现。
每20ms到来会执行一次:
- 读取传感器加速度和角速度信息。
- 互补平衡滤波计算当前姿态。
- 用PID算法计算出前轮转角。
遥控和调试
两部分:状态输出和指令接收。
状态输出
在main函数的while循环里,利用串口中断构建一个简单的界面显示状态。
指令接收
串口接收到的数据会传给main/control.c,该文件分析串口数据,解释成相应的操作。主要是PID参数调节。
六、广告
老婆做毕业设计,给我下了死命令,一定要找300个程序员研究一下,请各位同行做个调查问卷,可扫描下面二维码或者直接点击此链接:https://www.wjx.cn/jq/17710478.aspx,多谢!

本站所有文章欢迎转载,但请保留作者信息和原文地址。