PCA9685 16路12位pwm信号发生器
16路12位PWM信号发生器,可用于控制舵机、led、电机等设备,i2c通信,节省主机资源。
一、概述和硬件
1、概述
数据手册从网上找一下很容易找到(比如http://www2.ic37.com/pdf/pdf_download.asp?id=11155998_602380),但没有找到中文版,本文记录的是我使用中总结的内容和方法。
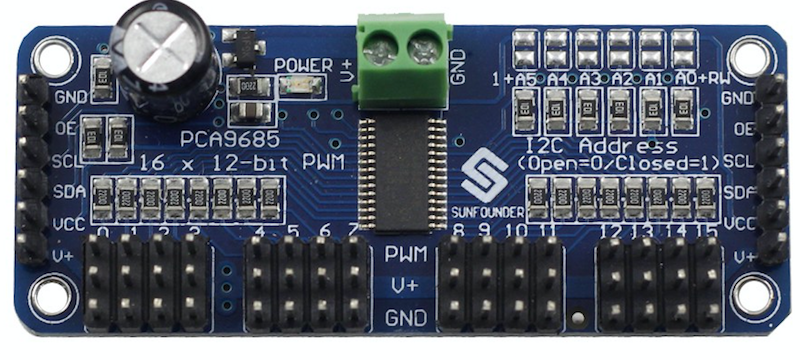
很常见的模块板子如上图所示,这个板子也比较便宜,十几块钱一个。
i2c通信,只需要几根i2c线就可以控制16路pwm,周期和占空比都可控。
可以多个模块级联。
可控制16路通道的四种工作模式:关、开、pwm、可变pwm。
精度是12位:
| 工作频率 | 时间分辨率 | 通常舵机500~2500us可分成份数 | 通常舵机500~2500us,旋转角180°的角度分辨率 | 对于电调,500us对应100%的占空比分辨率 |
|---|---|---|---|---|
| 50Hz | 4.88us | 410份 | 0.439° | 0.976%≈1%(约100份) |
| 60Hz | 4us | 492份 | 0.366° | 0.8%(125份) |
驱动方式可以选择开漏输出或推挽输出。
2、硬件
1、电压
数字电路电压范围可接受3.3和5v电平。
此外还有一个v+引脚,这个引脚是给舵机供电用的,可以接稍微高一点的电压。
2、i2c地址
有6个地址控制脚,通过这些引脚可以控制设备的i2c地址。
7位的I2C地址为:0x40 + A5:A0,A5到A0如果不做任何处理的话是0,想要把哪一位置1就把那个引脚焊到一起。
另外用i2cdetect检测出还有一个0x70地址一直存在,这是一个通用地址,可以给所有从机下达指令。
3、使能脚
模块有一个OE反使能脚,这个引脚低电平使能,不接的话模块内部默认已经接地使能了,所以正常使用可以不接。
二、寄存器功能
| 内部地址(hex) | 名称 | 功能 |
|---|---|---|
| 00 | MODE1 | 设置寄存器1 |
| 01 | MODE2 | 设置寄存器2 |
| 02 | SUBADR1 | i2c-bus subaddress1 |
| 03 | SUBADR2 | i2c-bus subaddress2 |
| 04 | SUBADR3 | i2c-bus subaddress3 |
| 05 | ALLCALLADR | |
| 06 | LED0_ON_L | |
| 07 | LED0_ON_H | |
| 08 | LED0_OFF_L | |
| 09 | LED0_OFF_H | |
| … | … | … |
| 0x06 + 4*X | LEDX_ON_L | |
| 0x06 + 4*X + 1 | LEDX_ON_H | |
| 0x06 + 4*X + 2 | LEDX_OFF_L | |
| 0x06 + 4*X + 3 | LEDX_OFF_H | |
| … | … | … 上面共16路通道 |
| FA | ALL_LED_ON_L | |
| FB | ALL_LED_ON_H | |
| FC | ALL_LED_OFF_L | |
| FD | ALL_LED_OFF_H | |
| FE | PRE_SCALE | 控制周期的寄存器 |
| FF | TestMode |
MODE1寄存器
| 位 | 名称 | 功能 |
|---|---|---|
| D7 | RESTART | 写1复位,写完后此位自动清除。一定要在SLEEP位写0后至少500us后才能对此位写1进行复位。 |
| D6 | EXTCLOCK | 0-使用内部时钟(25MHz)。1-使用外部时钟引脚的时钟。修改此位前,一定要先SLEEP,再修改此位(此时SLEEP位仍然写1),再退出SLEEP。 |
| D5 | AI | 0-内部地址读写后不自动增加。1-内部地址读写后自动增加。一般i2c设备在对从机读写后内部地址都会自动增加,这个芯片可以手动设置是否自动增加,我们一般都会设成自动增加。 |
| D4 | SLEEP | 0-退出SLEEP模式。1-进入SLEEP模式。注:1、写0退出sleep模式后,最多等500us后即可产生稳定的时钟信号。2、写1进入sleep模式后,时钟会关闭。此时可以修改时钟源寄存器EXTCLOCK和周期寄存器PRE_SCALE,修改这两个寄存器之前必须先进入sleep模式。 |
| D3 | SUB1 | |
| D2 | SUB2 | |
| D1 | SUB3 | |
| D0 | ALLCALL | 0-不响应0x70通用i2c地址。1-响应0x70通用i2c地址。这个芯片除了可以通过A5:A0自定义i2c地址外,还有一个通用i2c地址0x70,此寄存器可以控制是否响应这个通用地址。注意啊:这个寄存器的设置好像掉电会保存的! |
各个通道的ON和OFF寄存器
总共16个通道,每个通道都有 LEDX_ON_L、LEDX_ON_H、LEDX_OFF_L、LEDX_OFF_H 四个寄存器。
系统中有一个12位的计数ACK,ACK根据PRE_SCALE寄存器设置的周期进行增加,没增加一次就会和上述四个寄存器对比:
当发现 ACK == LEDX_ON_H[3:0]:LEDX_ON_L 时,X通道输出高电平;
当发现 ACK == LEDX_OFF_H[3:0]:LEDX_OFF_L 时,X通道输出低电平。
PRE_SCALE寄存器
这个寄存器是用来设置周期的,具体原理可以不用管,只要记住这个公式:

其中osc_clock是时钟,根据上面的寄存器设置选择是内部25MHz时钟还是外部时钟;
update_rate是频率,比如周期是20ms,那么频率就是50。
注意:实际应用中发现有误差,需要加入校准,要把udpate_rate乘以0.915。
包括从网上下载的arduino驱动中也加入了此校准。
三、驱动
网上可以找到arduino平台的驱动,我在在这里是用树莓派驱动的,介绍一下基于树莓派wiringPi库的驱动。
树莓派wiringPi平台
这里是基于树莓派wiringPi提供的i2c通信接口基础上实现的驱动,在其他平台上的驱动方法类似,只要把这里的i2c接口换成其他平台的通信接口即可。
本驱动周期固定为20ms不可变,如需修改也非常容易。
pca9685_wiringpi.h文件:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 | |
pca9685_wiringpi.c文件:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 | |
关于驱动在树莓派上的速度:
| 树莓派设置的i2c波特率 | 设置16路通道所用时间 |
|---|---|
| 100000 | |
| 1000000(1M) | 2067us |
| 2000000(2M) | 1300us |
四、使用流程
1、确定i2c地址
通过焊接A5~A0确定模块的i2c地址,如果不做任何焊接,默认地址是0x40。
2、连接数字电路电源。
3、连接两根i2c线。
4、连接v+引脚,给舵机供电电源。
5、把驱动合入到工程,即可使用。
本站所有文章欢迎转载,但请保留作者信息和原文地址。